리소스 센터 > 사례 연구
AGV 호환 가이드 레일 유압 리프트|2톤, 400mm 얕은 피트





관련 미디어
공유
게시일: 2026년 6월 12일




개요
프로젝트 유형: 가이드 레일 유압 리프트 (2:1 속도)
클라이언트: 지능형 물류 및 스마트 제조 기업 (AGV 적용)
산업: 스마트 공장, 자동화 창고, 유연한 생산 라인
주요 기능: AGV 직접 도킹, 전용 AGV 인터페이스, 2:1 속도 비율을 갖춘 얕은 피트, 바닥 연동 장치

애플리케이션 시나리오
이 고객사는 스마트 팩토리와 자동화 물류 분야에 주력하는 기업입니다. 해당 기업의 작업장 및 창고에서는 이미 자재 이동을 위해 AGV를 사용하고 있습니다. 하지만 AGV는 한 층 내에서만 작동할 뿐, 층간 이동은 불가능합니다.
기존 방식에서는 AGV에서 화물을 수작업으로 하역한 후, 지게차나 화물용 리프트를 이용해 다른 층으로 화물을 옮겨야 합니다.
이로 인해 효율성이 떨어지고 인건비가 증가하며, 자동화된 물류 체인이 단절됩니다.
도전 과제
- 얕은 구덩이 대 높은 이동 거리: 피트 깊이는 400mm에 불과하지만 3.5m의 이동 거리가 필요합니다. 1:1 실린더는 장착할 수 없으므로 속도 증폭 장치가 필요합니다.
- 정밀한 AGV 도킹: AGV는 리프트 플랫폼 위로 자동으로 진입해야 합니다. 높은 수평 조정 정확도와 신뢰할 수 있는 감지 기능이 요구되며, AGV 제어 시스템과의 신호 교환도 필요합니다.
- 바닥 안전 인터록: 2개의 고속 강성 롤러 도어(층당 1개)는 엘리베이터와 전기적으로 연동되어야 합니다. 즉, 도어가 닫히지 않으면 엘리베이터가 움직일 수 없으며, 엘리베이터가 해당 층에 도착하지 않으면 도어가 열리지 않습니다.
- 고하중 및 강성: 2톤 적재 용량에 비교적 넓은 적재대(1800×2000mm)를 갖추고 있어, 흔들림 없이 부드럽게 들어 올리는 것이 필수적입니다.

핵심 사양
| 매개변수 | 가치 |
|---|---|
| 모델 | SJD2.0‑3.0 (2:1 속도) |
| 정격 부하 | 2,000kg |
| 여행 높이 | 3,500 mm |
| 플랫폼 크기(W×D) | 1,800×2,000 mm |
| 차량 내부 높이 | 2,200 mm |
| 구덩이 깊이 | 400mm |
| 구조 | 실린더 2개, 가이드 레일 4개, 2:1 속도 |
| 가이드 레일 | 125H 국가 표준 ×4 |
| 실린더 | Φ70-50 ×2 |
| 전원 장치 | 3kW |
| 체인 | 1244 플레이트 체인 ×4 |
| 와이어 로프 | #12 대각선 이중 레벨링 |
| 플랫폼 프레임 | 120×60×4mm |
| 플랫폼 데크 | 4mm 체크 플레이트 |
| 리프팅 프레임 | 100×50×4mm |
| 가위형 베이스 프레임 | 160×80×4mm |
| 바닥 문 | 고속 강성 롤러 도어 2개 (폭 2000×높이 2200), 회색, 연동식 |
| 안전 장치 | 기계식 추락 방지 착지 장치 |
| 제어 | PLC, 전용 AGV 인터페이스 |
| 설치 | 바닥 개구부, 400mm 깊이의 구덩이 |
| 색상 | 회색 |
| 주요 특징 | AGV가 플랫폼으로 진입합니다. AGV 인터페이스 준비 완료 |
솔루션
2:1 Speed hydraulics – 3.5m travel from a 400mm shallow pit
- 구덩이 깊이: 400mm (일반적인 2톤 리프트는 600~800mm가 필요합니다).
- 솔루션: 2:1 속도 변환 장치 (체인 + 풀리 배율 장치). 실린더 Φ70‑50 ×2개. 실린더 스트로크 약 1.75m, 2배 증폭되어 3.5m의 카 이동 거리를 확보합니다. 실린더는 400mm 깊이의 얕은 구덩이에 수직으로 설치되며, 깊은 굴착이 필요하지 않습니다.
- 가이드 레일: 125H 국가 표준 ×4 – 수직 정확도를 확보하십시오.
AGV docking & interface reservation
- 도킹 방식: AGV가 리프트 플랫폼 위로 직접 진입합니다(플랫폼 크기 1800×2000mm, 높이는 AGV 적재 데크에 맞춰져 있음).
- 수평 측정 정확도: PLC 제어 및 리미트 스위치를 통해 수평 조정 정확도 ≤±5mm를 보장하며, AGV 자동 진입/출구 요건을 충족합니다.
- 인터페이스 예약: 제어 시스템은 AGV 인터페이스 (Profinet, Modbus TCP 또는 I/O 건식 접점과 같은 통신 프로토콜). 이후 AGV 배차 시스템에 연결하여 자동 호출 및 위치 피드백 기능을 활용할 수 있습니다.
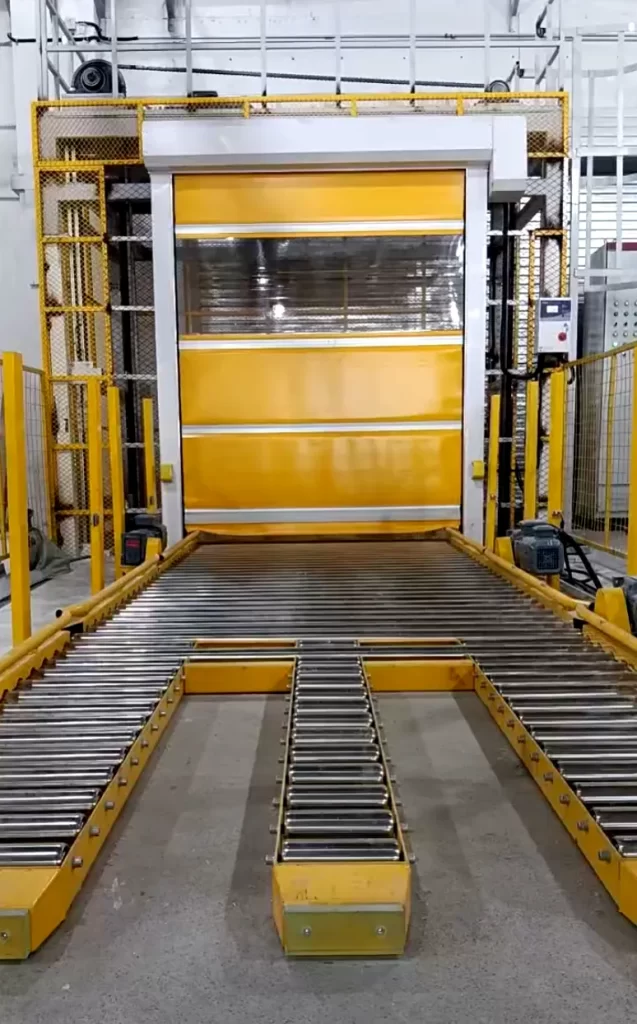
Floor safety interlock & roller door coordination
- 바닥 문: 고속 강성 롤러 도어 2개 (폭 2000mm × 높이 2200mm), 회색.
- 인터록 논리:
- 롤러 도어가 완전히 닫히지 않으면 리프트가 작동하지 않습니다.
- 엘리베이터가 층에 정확히 정차하지 않으면 해당 층의 문은 열리지 않습니다.
- 엘리베이터가 움직이는 동안 모든 문은 닫혀 있습니다.
- 낙하 방지 착지 장치: 기계식 잠금 장치 – 각 층에서 플랫폼을 자동으로 잠그어 유압이 상실되더라도 플랫폼이 내려앉는 것을 방지합니다.
Structure & materials
- 자동차: 폭 1800mm × 깊이 2000mm × 높이 2200mm, 탄소강 체크 플레이트로 완전히 밀폐된 구조(3면 + 상단) – 미끄럼 방지 및 내마모성.
- 플랫폼 프레임: 120×60×4mm 직사각형 튜브; 갑판 4mm 체크 플레이트.
- 리프팅 프레임: 100×50×4mm 사각관; 가위형 베이스 프레임: 160×80×4mm 사각관.
- 체인: 1244 플레이트 체인 ×4; 와이어 로프: #12 대각선 이중 레벨링.
- 전원 장치: 3kW, 380V/50Hz; 호스 직경 18mm.
- 색상: 회색.
Control & intelligence
- PLC 제어: 자동 수평 조정, 오류 경보, 연동 로직.
- 운영: 로컬 푸시 버튼/터치 스크린 또는 전용 인터페이스를 통한 원격 제어.
- 확장성: 전용 AGV 인터페이스 – 향후 완전 자동화된 층간 물류 시스템으로의 업그레이드 예정.
제품 인증서




자주 묻는 질문
자재 취급 장비를 사용자 지정하려면 다음과 같이 하세요. 문의하기 →.