리소스 센터 > 사례 연구
자율주행차 테스트용 5톤 서보 회전 플랫폼 | ±0.5° 단계 정밀도



관련 미디어
공유
게시일: 2026년 6월 11일




개요
프로젝트 유형: 고정밀 서보 회전 플랫폼 (고하중용 턴테이블)
클라이언트: 선도적인 자율주행 장비 제조업체
자매 프로젝트: 동일 회사의 다른 기지에 이전에 인도된 것과 동일한 모델
산업: 자율주행 장비 제조 (무인 지게차, 지능형 섀시, 무인 차량)
주요 기능: 360° 연속 회전 + 10° 단위 위치 조정

애플리케이션 시나리오
- 전력 시스템 부하 순환 시험: 차량 섀시는 회전대에 고정되며, 회전대는 초당 1~5°의 속도로 회전하여 지속적인 조향 또는 원형 주행을 시뮬레이션함으로써 출력 안정성과 에너지 소비량을 측정합니다.
- 조향 시스템 내구성 시험: 스텝 모드(1회당 10°, 10초 정지)는 빈번한 조향 동작을 시뮬레이션하여 기계적 피로 수명과 ECU 응답 정확도를 테스트합니다.
- 다각도 정적 차량 시험: 섀시 스캔, 센서 보정 및 도강 자세 시뮬레이션을 위해 차량을 특정 각도(예: 15°, 30°, 45°)로 회전시킨다.
도전 과제
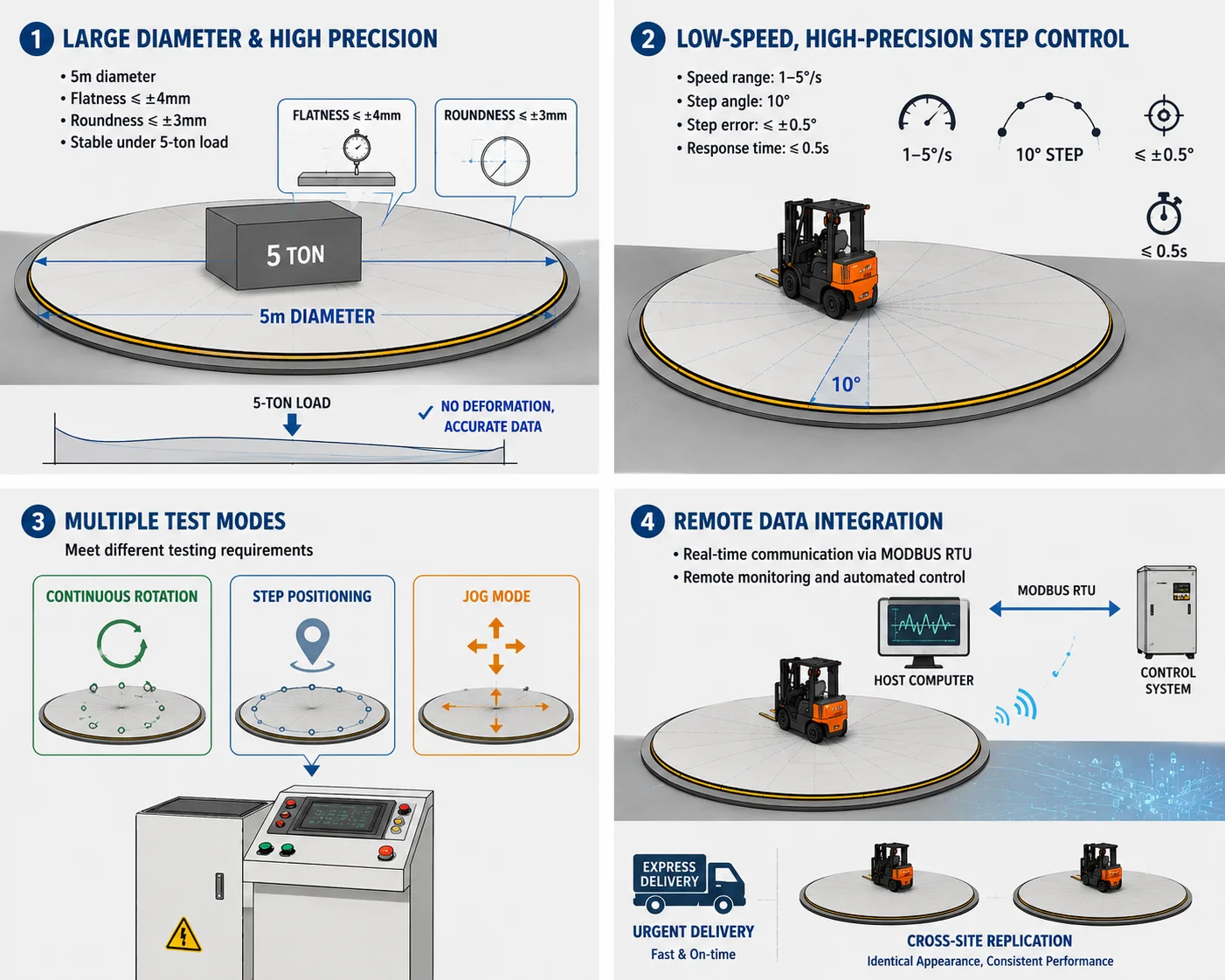
- 대경 및 고정밀: 직경 5m, 평탄도 ≤±4mm, 진원도 ≤±3mm. 5톤의 하중이 가해지면 대형 회전대는 변형되는 경향이 있어 시험 데이터의 정확도에 영향을 미칩니다.
- 저속 고정밀 스텝 제어: 속도 범위 1~5°/s, 단계 각도 10°, 단계 오차 ≤±0.5°, 응답 시간 ≤0.5초. 흔들림이 발생하면 센서 신호에 방해가 됩니다.
- 다양한 테스트 모드: 다양한 테스트 요구 사항에 맞춰 연속 회전, 단계별 위치 지정 및 조그 모드를 지원해야 합니다.
- 원격 데이터 통합: 원격 모니터링 및 자동 제어를 위해 MODBUS RTU를 통해 호스트 컴퓨터와 실시간으로 통신합니다.
- 긴급 사이트 간 복제: 고객은 외관을 포함해 “완전히 동일한” 제품을 요구했으며, 납기가 매우 촉박했습니다.
핵심 사양
| 매개변수 | 가치 |
|---|---|
| 지름 | 5,000 mm |
| 정격 부하 | 5,000kg |
| 평탄도 | ≤ ±4mm |
| 둥글림 | ≤ ±3 mm |
| 속도 범위 | 1–5 °/s (설정 가능) |
| 계단 각도 | 10° (오차 ≤±0.5°) |
| 회전 방향 | ±360° |
| 응답 시간 | ≤ 0.5 s |
| 구동 / 제어 | 지멘스 서보 폐루프 |
| 조작 패널 | 12인치 터치 스크린 + 백라이트 버튼 |
| 의사소통 | MODBUS RTU (이더넷 / RS485) |
| 안전 기능 | 비상 정지, 과부하 릴레이, 부드러운 시동/정지, 원터치 리셋 |
| 이전 단원과의 관련성 | 고객의 다른 기지에 공급된 것과 동일한 모델의 정확한 복제품 |
| 주문일 / 발송일 | 2026년 4월 9일 / 2026년 5월 9일 |
솔루션
4.1 대구경, 고강성 구조
- 고강도 강철 프레임, 유한요소법(FEA)으로 최적화된 일체형 가공 플랫폼 데크.
- 여러 개의 보강재가 5톤의 하중을 고르게 분산시킵니다.
- 평탄도/원형도 100%는 출하 전에 검사되었습니다. 높이는 자이보(Zibo) 제품과 일치합니다.
4.2 지멘스 서보 폐루프 제어
- 고해상도 인코더가 장착된 지멘스 서보(지보 장치와 동일한 모델).
- 세 가지 프로그래밍 가능한 작동 모드:
- 지속적인 회전: 1~5°/s 조절 가능
- 단계별 위치 지정: 단계당 10°, 체류 시간 조절 가능
- 조깅 모드: 보정을 위한 미세 조정
- 부드러운 기동/정지, 임의 기동/정지, 원터치 리셋, 비상 정지, 과부하 보호.
4.3 MODBUS RTU 통신
- 이더넷 및 RS485 포트, 각도, 속도 및 상태의 실시간 전송.
- 12인치 로컬 터치스크린과 더불어, 고객의 테스트 관리 시스템에 대한 원격 접속 기능.
4.4 긴급 복제 및 배송
- 지보 장치의 전체 도면, PLC 소스 코드 및 자재 명세서(BOM)를 확보했습니다.
- 주요 부품 사전 주문 완료 (지멘스 서보 모터).
- 4월 9일 주문 → 5월 9일 발송 – 한 달 만에 배송 완료.
제품 인증서




자주 묻는 질문
자재 취급 장비를 사용자 지정하려면 다음과 같이 하세요. 문의하기 →.




