РЕСУРСНЫЙ ЦЕНТР > Кейс-стади
5-тонная сервоприводная поворотная платформа для испытаний автономных транспортных средств | Точность шага ±0,5°



СООТВЕТСТВУЮЩИЕ СРЕДСТВА МАССОВОЙ ИНФОРМАЦИИ
ПОДПИШИСЬ НА
Опубликовано: 11 июня 2026 г.




Обзор
Тип проекта: Высокоточная сервоприводная поворотная платформа (поворотный стол повышенной грузоподъемности)
Клиент: Ведущий производитель оборудования для автономного вождения
Партнёрский проект: Такая же модель, ранее поставленная на другую базу той же компании
Промышленность: Производство оборудования для автономного вождения (беспилотные вилочные погрузчики, интеллектуальные шасси, беспилотные транспортные средства)
Основные функции: плавное вращение на 360° + позиционирование с шагом 10°

Сценарии применения
- Испытание по ротации нагрузки в энергосистеме: Шасси транспортного средства закреплено на поворотном столе, который вращается со скоростью 1–5°/с для имитации непрерывного поворота руля или движения по кругу, что позволяет измерить стабильность выходной мощности и расход энергии.
- Испытание на долговечность рулевого управления: Режим шагового перемещения (шаг 10°, пауза 10 секунд) имитирует частые движения рулевого управления, позволяя проверить износостойкость механических узлов и точность реакции блока управления двигателем.
- Многоугольные статические испытания транспортных средств: Автомобиль поворачивают на определенные углы (например, 15°, 30°, 45°) для сканирования ходовой части, калибровки датчиков и моделирования положения при преодолении водных преград.
Вызовы
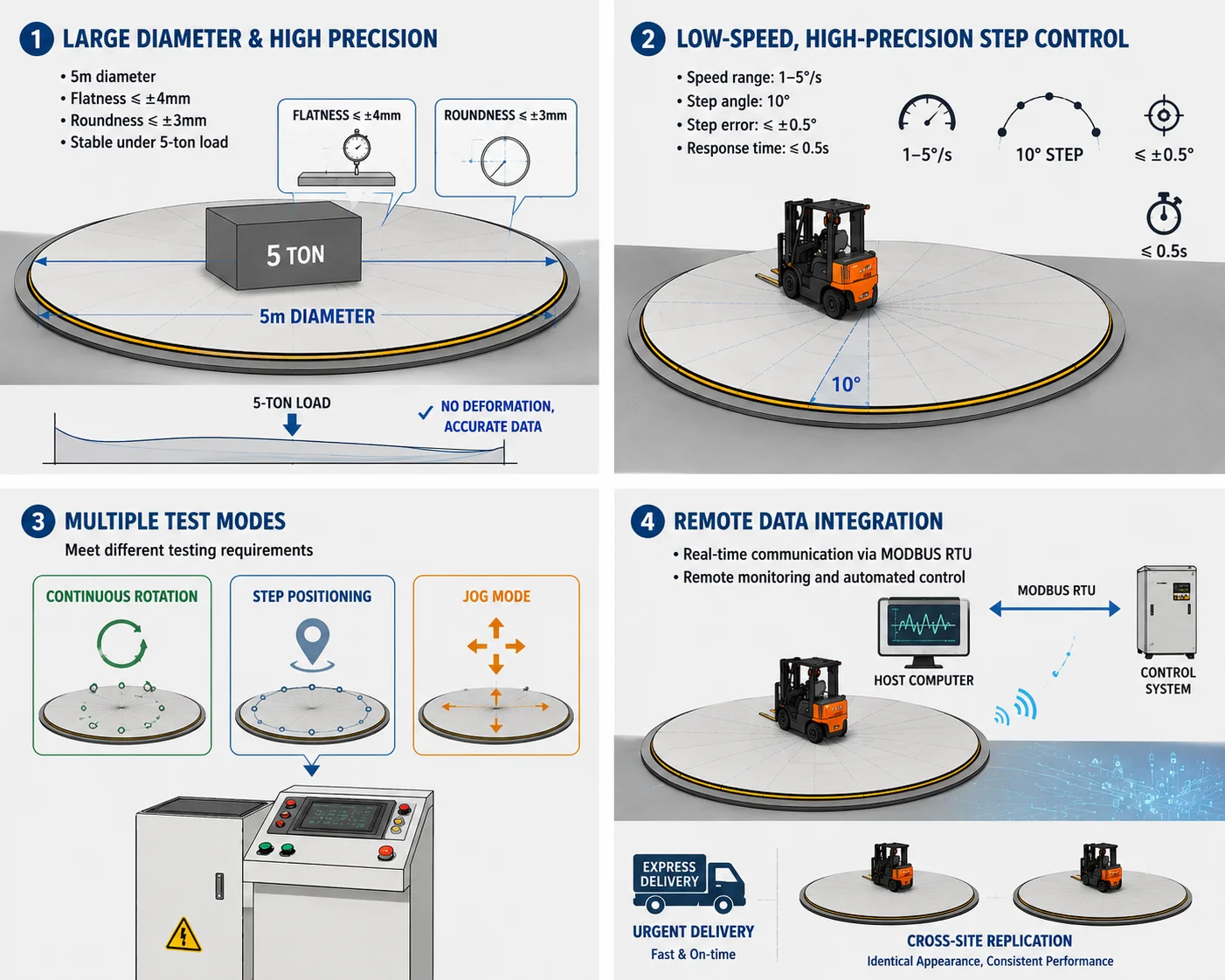
- Большой диаметр и высокая точность: диаметр 5 м, плоскостность ≤±4 мм, округлость ≤±3 мм. Под нагрузкой в 5 тонн большие поворотные столы имеют тенденцию прогибаться, что сказывается на точности результатов испытаний.
- Низкоскоростное высокоточное шаговое управление: Диапазон скорости 1–5°/с, шаг поворота 10°, погрешность шага ≤±0,5°, время отклика ≤0,5 с. Любое колебание мешает приему сигналов датчика.
- Несколько режимов тестирования: Должна поддерживать режимы непрерывного вращения, позиционирования с шагом и импульсного перемещения для различных требований к испытаниям.
- Удаленная интеграция данных: Связь с главным компьютером в режиме реального времени по протоколу MODBUS RTU для удаленного мониторинга и автоматического управления.
- Срочная межсайтовая репликация: Заказчик потребовал “идентичный” экземпляр — в том числе и по внешнему виду — а срок поставки был крайне сжатым.
Технические характеристики ядра
| Параметр | Значение |
|---|---|
| Диаметр | 5 000 мм |
| Номинальная нагрузка | 5 000 кг |
| Плоскость | ≤ ±4 мм |
| Округлость | ≤ ±3 мм |
| Диапазон скоростей | 1–5 °/с (настраиваемое) |
| Угол поворота | 10° (погрешность ≤±0,5°) |
| Направление вращения | ±360° |
| Время отклика | ≤ 0.5 s |
| Привод / управление | Сервопривод Siemens с замкнутым контуром |
| Панель управления | 12-дюймовый сенсорный экран + подсвеченные кнопки |
| Общение | MODBUS RTU (Ethernet / RS485) |
| Особенности безопасности | Аварийная остановка, реле перегрузки, плавный пуск/остановка, сброс одной кнопкой |
| Связь с предыдущим разделом | Точная копия той же модели, поставленной на другую базу заказчика |
| Дата заказа / отправки | 9 апреля 2026 г. / 9 мая 2026 г. |
Решения
4.1 Конструкция большого диаметра с высокой жесткостью
- Каркас из высокопрочной стали, оптимизированный с помощью метода конечных элементов, с цельнофрезерованной платформой.
- Несколько ребер жесткости равномерно распределяют нагрузку в 5 тонн.
- Плоскостность/округлость 100% проверяется перед отгрузкой. Высота соответствует модели Zibo.
4.2 Система сервоуправления Siemens с замкнутым контуром
- Сервопривод Siemens (такой же модели, как и агрегат Zibo) с энкодером высокого разрешения.
- Три программируемых режима работы:
- Непрерывное вращение: 1–5°/с, регулируемая
- Пошаговое позиционирование: 10° на каждый шаг, время выдержки регулируется
- Режим бега трусцой: точная настройка для калибровки
- Плавный запуск/остановка, произвольный запуск/остановка, сброс одной кнопкой, аварийная остановка, защита от перегрузки.
4.3 Связь по протоколу MODBUS RTU
- Порты Ethernet и RS485, передача данных об угле поворота, скорости и состоянии в режиме реального времени.
- 12-дюймовый локальный сенсорный экран, а также удаленный доступ к системе управления испытаниями заказчика.
4.4 Срочное тиражирование и доставка
- Получены полные чертежи, исходный код ПЛК и спецификация узла Zibo.
- Заказаны основные компоненты (сервомотор Siemens).
- Заказ размещен 9 апреля → отправлен 9 мая — доставлен через месяц.
Сертификаты на продукцию




FAQ
Если вы хотите изготовить оборудование для обработки материалов по индивидуальному заказу, пожалуйста свяжитесь с нами →.




