CENTRE DE RESSOURCES > ÉTUDES DE CAS
Plateforme rotative à servocommande de 5 tonnes pour les essais de véhicules autonomes | Précision de pas de ±0,5°



MÉDIAS ASSOCIÉS
PARTAGER
PUBLIÉ LE : 11/06/2026




Vue d'ensemble
Type de projet: Plateforme rotative à servocommande de haute précision (plateau tournant à usage intensif)
Client: Un fabricant de premier plan d'équipements pour la conduite autonome
Projet jumeau: Même modèle déjà livré à une autre base de la même entreprise
L'industrie: Fabrication d'équipements pour la conduite autonome (chariots élévateurs sans conducteur, châssis intelligents, véhicules autonomes)
Fonctions principales: rotation continue à 360° + positionnement par paliers de 10°

Scénarios d'application
- Essai de rotation de la charge du réseau électrique: Le châssis du véhicule est fixé sur la plate-forme tournante, qui tourne à une vitesse de 1 à 5°/s afin de simuler une direction continue ou une conduite en cercle, ce qui permet de mesurer la stabilité de la puissance délivrée et la consommation d'énergie.
- Essai de durabilité du système de direction: Le mode pas à pas (10° par pas, pause de 10 secondes) simule des manœuvres de direction fréquentes, permettant ainsi de tester la résistance à la fatigue mécanique et la précision de la réponse de l'ECU.
- Essais statiques de véhicules sous différents angles: Le véhicule est incliné selon des angles précis (par exemple 15°, 30°, 45°) pour permettre le balayage du châssis, l'étalonnage des capteurs et la simulation de la position lors du passage à gué.
Défis
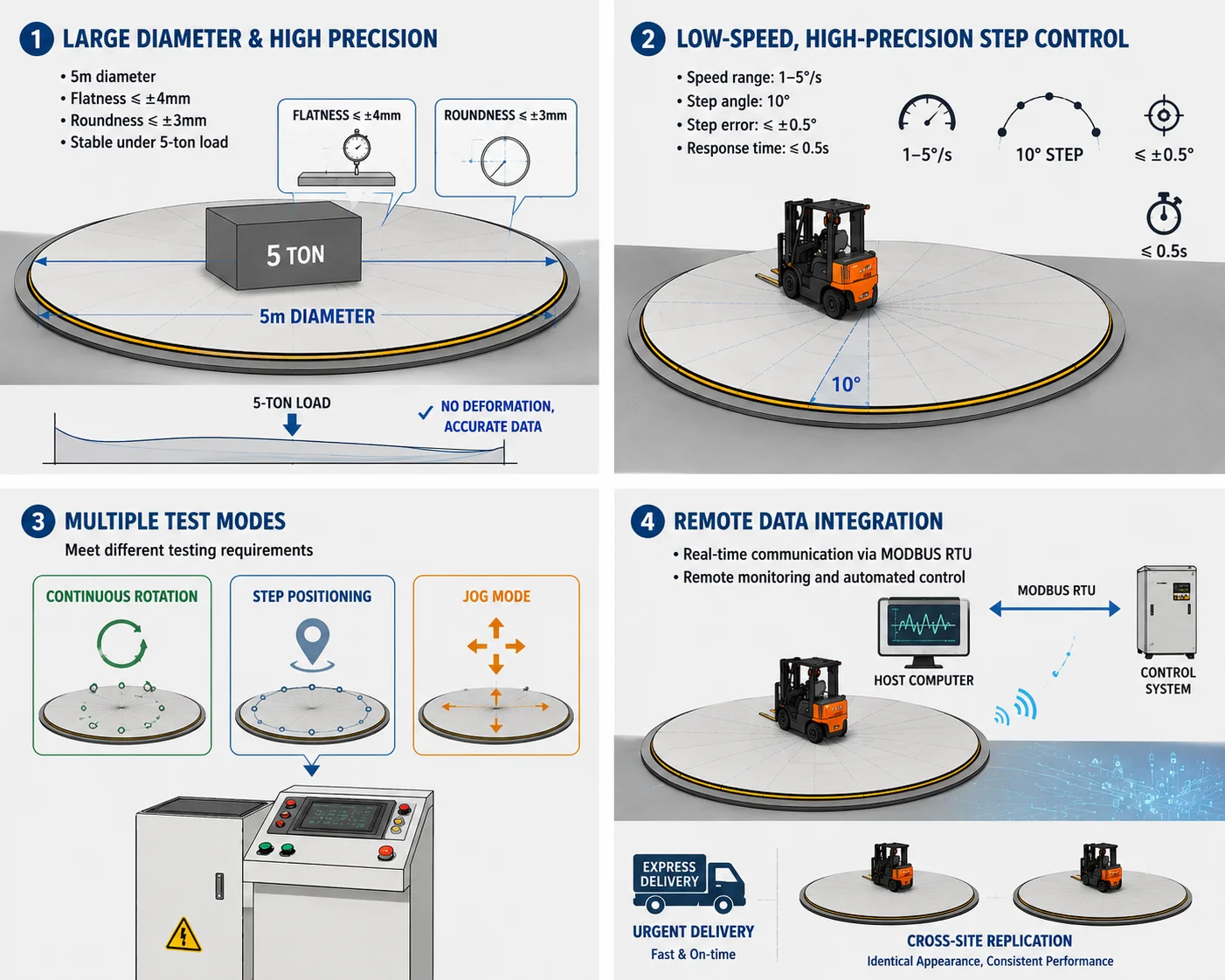
- Grand diamètre et haute précision: diamètre de 5 m, planéité ≤ ±4 mm, circularité ≤ ±3 mm. Sous une charge de 5 tonnes, les grandes plateaux tournants ont tendance à se déformer, ce qui affecte la précision des données d'essai.
- Commande pas à pas à basse vitesse et haute précision: Plage de vitesse de 1 à 5°/s, angle de pas de 10°, erreur de pas ≤ ±0,5°, temps de réponse ≤ 0,5 s. Tout vacillement perturbe les signaux des capteurs.
- Plusieurs modes de test: Doit prendre en charge les modes de rotation continue, de positionnement par pas et de déplacement pas à pas pour répondre à différentes exigences de test.
- Intégration de données à distance: Communication en temps réel avec un ordinateur hôte via MODBUS RTU pour la surveillance à distance et la commande automatisée.
- Réplication urgente entre sites: Le client souhaitait un produit “ identique ” – y compris en termes d'aspect – et la livraison était extrêmement urgente.
Spécifications de base
| Paramètres | Valeur |
|---|---|
| Diamètre | 5 000 mm |
| Charge nominale | 5 000 kg |
| Planéité | ≤ ±4 mm |
| Rondeur | ≤ ±3 mm |
| Plage de vitesse | 1 à 5 °/s (réglable) |
| Angle de pas | 10° (erreur ≤ ±0,5°) |
| Sens de rotation | ±360° |
| Temps de réponse | ≤ 0,5 s |
| Entraînement / commande | Servocommande Siemens en boucle fermée |
| Panneau de commande | Écran tactile de 12 pouces + boutons lumineux |
| Communication | MODBUS RTU (Ethernet / RS485) |
| Les dispositifs de sécurité | Arrêt d'urgence, relais de surcharge, démarrage et arrêt progressifs, réinitialisation par simple pression sur un bouton |
| Lien avec le chapitre précédent | Réplique exacte du même modèle fourni à l'autre site du client |
| Date de commande / d'expédition | 9 avril 2026 / 9 mai 2026 |
Solutions
4.1 Structure de grand diamètre et à haute rigidité
- Châssis en acier à haute résistance, optimisé par analyse par éléments finis, avec plancher de plate-forme usiné d'un seul tenant.
- Plusieurs renforts répartissent uniformément la charge de 5 tonnes.
- La planéité/circularité du modèle 100% a été contrôlée avant la livraison. La hauteur correspond à celle de l'unité de Zibo.
4.2 Commande en boucle fermée du servomoteur Siemens
- Servomoteur Siemens (même modèle que celui de Zibo) équipé d'un codeur haute résolution.
- Trois modes de fonctionnement programmables :
- Rotation continue: réglable de 1 à 5°/s
- Positionnement par pas: par paliers de 10°, durée de maintien réglable
- Mode jogging: réglage fin pour l'étalonnage
- Démarrage et arrêt en douceur, démarrage et arrêt à volonté, réinitialisation par simple pression sur un bouton, arrêt d'urgence, protection contre les surcharges.
4.3 Communication MODBUS RTU
- Ports Ethernet et RS485, transmission en temps réel de l'angle, de la vitesse et de l'état.
- Écran tactile local de 12 pouces, ainsi qu'un accès à distance au système de gestion des essais du client.
4.4 Reproduction et livraison en urgence
- J'ai récupéré les plans complets, le code source du PLC et la nomenclature de l'unité de Zibo.
- Composants clés commandés à l'avance (servomoteur Siemens).
- Commande passée le 9 avril → expédiée le 9 mai – livrée en un mois.
Certificats de produit




FAQ
Si vous souhaitez personnaliser votre équipement de manutention, veuillez cliquer ici. nous contacter →.




