RESOURCE CENTER > CASE STUDIES
5‑Ton Servo Rotating Platform for Autonomous Vehicle Testing | ±0.5° Step Accuracy



RELATED MEDIA
SHARE
POSTED: 6/11/2026




Overview
Project type: High‑precision servo rotating platform (heavy‑duty turntable)
Client: A leading autonomous driving equipment manufacturer
Sister project: Same model previously delivered to another base of the same company
Industry: Autonomous driving equipment manufacturing (unmanned forklifts, intelligent chassis, driverless vehicles)
Key functions: 360° continuous rotation + 10° step positioning

Application Scenarios
- Power system load rotation test: The vehicle chassis is fixed on the turntable, which rotates at 1‑5°/s to simulate continuous steering or circular driving, measuring power output stability and energy consumption.
- Steering system durability test: Step mode (10° per step, 10‑second dwell) simulates frequent steering actions, testing mechanical fatigue life and ECU response accuracy.
- Multi‑angle static vehicle tests: The vehicle is rotated to specific angles (e.g. 15°, 30°, 45°) for chassis scanning, sensor calibration, and water‑wading attitude simulation.
Challenges
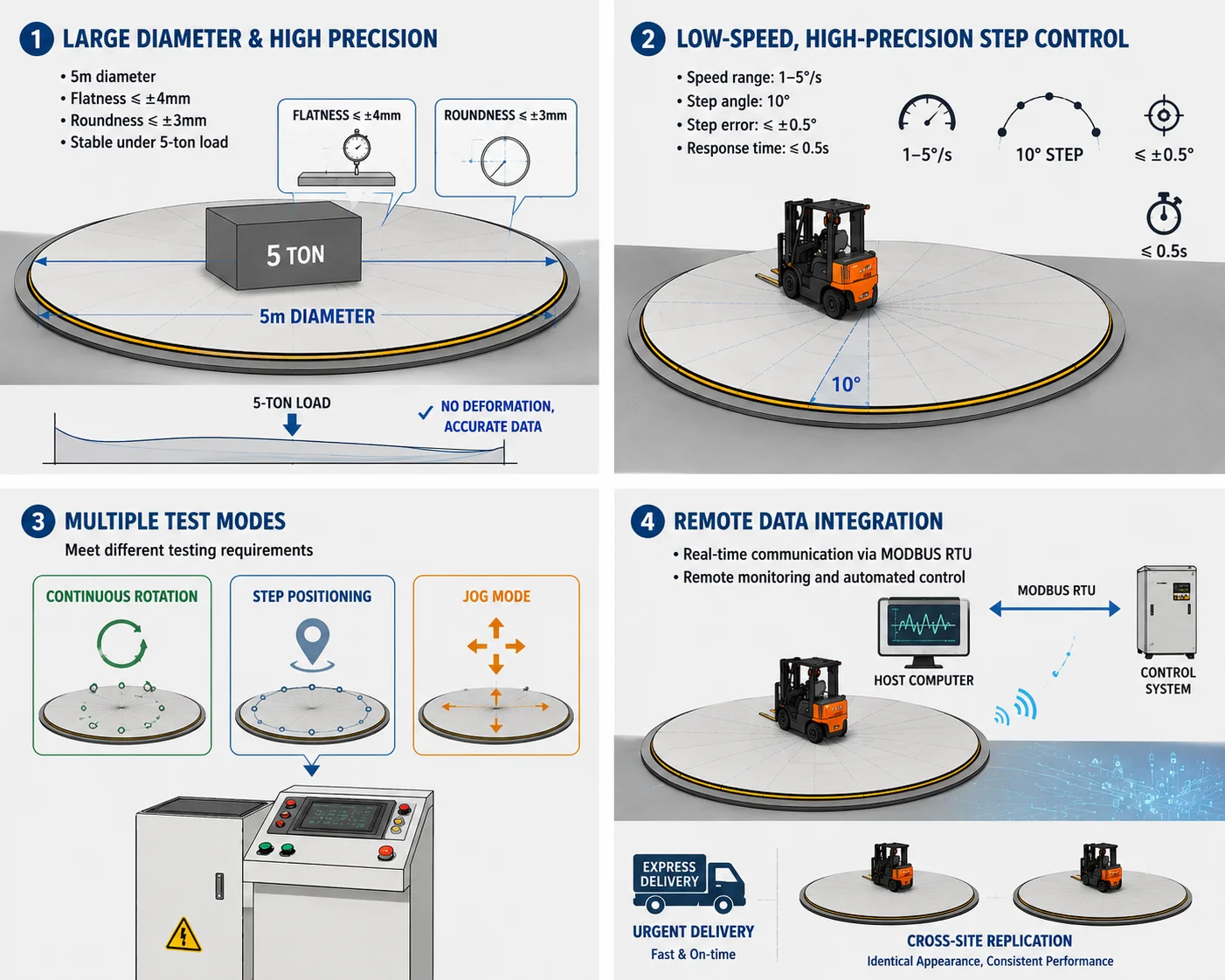
- Large diameter & high precision: 5m diameter, flatness ≤±4mm, roundness ≤±3mm. Under a 5‑ton load, large turntables tend to deflect, affecting test data accuracy.
- Low‑speed, high‑precision step control: 1‑5°/s speed range, 10° step angle, step error ≤±0.5°, response ≤0.5s. Any wobble interferes with sensor signals.
- Multiple test modes: Must support continuous rotation, step positioning and jog modes for different test requirements.
- Remote data integration: Real‑time communication with a host computer via MODBUS RTU for remote monitoring and automated control.
- Urgent cross‑site replication: The client required an “identical” unit – including appearance – and delivery was extremely urgent.
Core Specifications
| Parameter | Value |
|---|---|
| Diameter | 5,000 mm |
| Rated load | 5,000 kg |
| Flatness | ≤ ±4 mm |
| Roundness | ≤ ±3 mm |
| Speed range | 1 – 5 °/s (programmable) |
| Step angle | 10° (error ≤±0.5°) |
| Rotation direction | ±360° |
| Response time | ≤ 0.5 s |
| Drive / control | Siemens servo closed‑loop |
| Operator panel | 12″ touch screen + illuminated buttons |
| Communication | MODBUS RTU (Ethernet / RS485) |
| Safety features | Emergency stop, overload relay, smooth start/stop, one‑key reset |
| Relation to previous unit | Exact replica of the same model supplied to the client‘s other base |
| Order / Shipment date | April 9, 2026 / May 9, 2026 |
Solutions
4.1 Large‑diameter, high‑rigidity structure
- High‑strength steel frame, FEA‑optimised, integrally machined platform deck.
- Multiple stiffeners distribute the 5‑ton load evenly.
- Flatness/roundness 100% inspected before delivery. Height matches the Zibo unit.
4.2 Siemens servo closed‑loop control
- Siemens servo (same model as the Zibo unit) with high‑resolution encoder.
- Three programmable operation modes:
- Continuous rotation: 1‑5°/s adjustable
- Step positioning: 10° per step, dwell time adjustable
- Jog mode: fine adjustment for calibration
- Smooth start/stop, arbitrary start/stop, one‑key reset, emergency stop, overload protection.
4.3 MODBUS RTU communication
- Ethernet + RS485 ports, real‑time upload of angle, speed and status.
- 12″ local touch screen, plus remote access to the client‘s test management system.
4.4 Urgent replication & delivery
- Retrieved full drawings, PLC source code and BOM of the Zibo unit.
- Key components pre‑ordered (Siemens servo motor).
- Order placed April 9 → shipped May 9 – delivered in one month.
Product Certificates




FAQ
If you want to customize your material handling equipment, please contact us →.




