CENTRO DE RECURSOS > CASO
Plataforma giratoria servo de 5 toneladas para pruebas de vehículos autónomos | Precisión de paso de ±0,5°



MEDIOS DE COMUNICACIÓN RELACIONADOS
COMPARTIR
PUBLICADO: 11 de junio de 2026




Visión general
Tipo de proyecto: Plataforma giratoria servo de alta precisión (plataforma giratoria de alta resistencia)
Cliente: Un fabricante líder de equipos para la conducción autónoma
Proyecto hermano: El mismo modelo que se entregó anteriormente a otra base de la misma empresa
Industria: Fabricación de equipos para la conducción autónoma (montacargas no tripulados, chasis inteligentes, vehículos sin conductor)
Funciones principales: Rotación continua de 360° + posicionamiento por pasos de 10°

Escenarios de aplicación
- Prueba de rotación de la carga del sistema eléctrico: El chasis del vehículo se fija sobre la plataforma giratoria, que gira a una velocidad de 1 a 5°/s para simular una dirección continua o una conducción circular, midiendo así la estabilidad de la potencia de salida y el consumo de energía.
- Prueba de durabilidad del sistema de dirección: El modo por pasos (10° por paso, con una pausa de 10 segundos) simula movimientos frecuentes del volante, lo que permite evaluar la resistencia a la fatiga mecánica y la precisión de la respuesta de la ECU.
- Pruebas estáticas de vehículos en múltiples ángulos: El vehículo se gira a ángulos específicos (por ejemplo, 15°, 30°, 45°) para el escaneo del chasis, la calibración de los sensores y la simulación de la posición durante el vadeo.
Desafíos
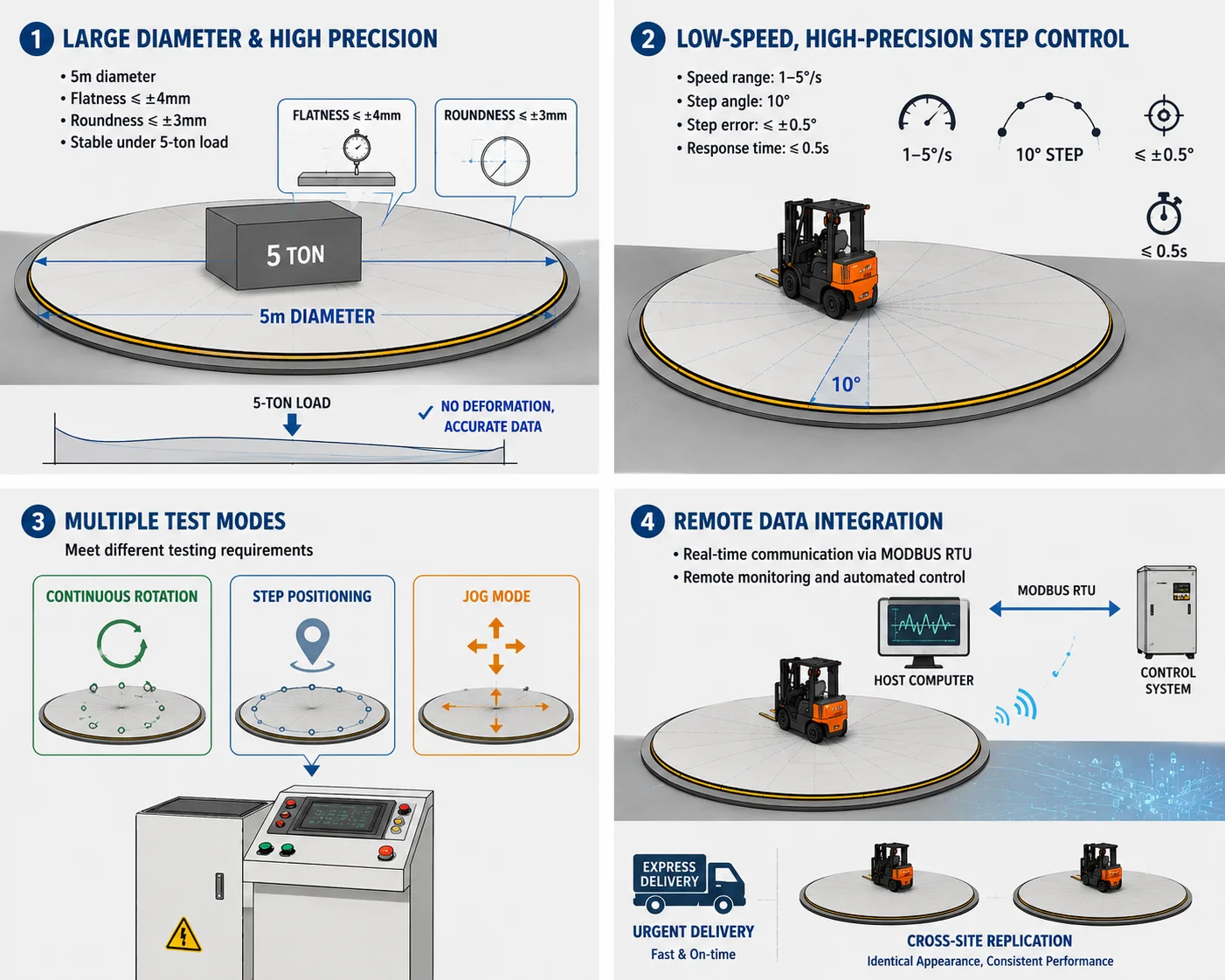
- Gran diámetro y alta precisión: 5 m de diámetro, planitud ≤±4 mm, redondez ≤±3 mm. Bajo una carga de 5 toneladas, las plataformas giratorias de gran tamaño tienden a deformarse, lo que afecta a la precisión de los datos de las pruebas.
- Control por pasos de baja velocidad y alta precisión: Rango de velocidad de 1 a 5°/s, ángulo de paso de 10°, error de paso ≤±0,5°, tiempo de respuesta ≤0,5 s. Cualquier oscilación interfiere con las señales del sensor.
- Varios modos de prueba: Debe ser compatible con los modos de rotación continua, posicionamiento por pasos y avance lento para satisfacer los distintos requisitos de prueba.
- Integración remota de datos: Comunicación en tiempo real con un ordenador central a través de MODBUS RTU para la supervisión remota y el control automatizado.
- Replicación urgente entre sitios: El cliente necesitaba una unidad “idéntica” —incluso en cuanto a la apariencia— y la entrega era extremadamente urgente.
Especificaciones básicas
| Parámetro | Valor |
|---|---|
| Diámetro | 5 000 mm |
| Carga nominal | 5 000 kg |
| Planicidad | ≤ ±4 mm |
| Redondez | ≤ ±3 mm |
| Rango de velocidades | 1 – 5 °/s (programable) |
| Ángulo de escalón | 10° (error ≤±0,5°) |
| Sentido de giro | ±360° |
| Tiempo de respuesta | ≤ 0.5 s |
| Accionamiento / control | Servo de bucle cerrado de Siemens |
| Panel de control | Pantalla táctil de 12 pulgadas + botones iluminados |
| Comunicación | MODBUS RTU (Ethernet / RS485) |
| Características de seguridad | Parada de emergencia, relé de sobrecarga, arranque y parada suaves, reinicio con un solo botón |
| Relación con la unidad anterior | Réplica exacta del mismo modelo suministrado a la otra base del cliente |
| Fecha del pedido / Fecha de envío | 9 de abril de 2026 / 9 de mayo de 2026 |
Soluciones
4.1 Estructura de gran diámetro y alta rigidez
- Estructura de acero de alta resistencia, optimizada mediante análisis por elementos finitos (FEA), con plataforma mecanizada de una sola pieza.
- Varios refuerzos distribuyen uniformemente la carga de 5 toneladas.
- Se ha comprobado la planitud/redondez del modelo 100% antes de la entrega. La altura coincide con la de la unidad de Zibo.
4.2 Control de bucle cerrado del servo de Siemens
- Servomotor Siemens (del mismo modelo que la unidad de Zibo) con encoder de alta resolución.
- Tres modos de funcionamiento programables:
- Rotación continua: ajustable entre 1 y 5°/s
- Posicionamiento de los pasos: 10° por paso, tiempo de permanencia ajustable
- Modo de trote: ajuste fino para la calibración
- Arranque y parada suaves, arranque y parada arbitrarios, reinicio con un solo botón, parada de emergencia, protección contra sobrecargas.
4.3 Comunicación MODBUS RTU
- Puertos Ethernet + RS485, transmisión en tiempo real del ángulo, la velocidad y el estado.
- Pantalla táctil local de 12 pulgadas, además de acceso remoto al sistema de gestión de pruebas del cliente.
4.4 Replicación y entrega urgentes
- Se obtuvieron los planos completos, el código fuente del PLC y la lista de materiales de la unidad de Zibo.
- Componentes clave reservados (servomotor Siemens).
- Pedido realizado el 9 de abril → enviado el 9 de mayo – entregado en un mes.
Certificados de producto




FAQ
Si desea personalizar su equipo de manipulación de materiales, por favor Contáctanos →.




