CENTRE DE RESSOURCES > ÉTUDES DE CAS
Plateforme omnidirectionnelle à roues Mecanum, élévatrice et extensible, pour l'alignement des attelages ferroviaires | Élévateur mobile 3-en-1




MÉDIAS ASSOCIÉS
PARTAGER
PUBLIÉ LE : 10/06/2026




Vue d'ensemble
Type de projet: Plateforme mobile omnidirectionnelle à roues Mecanum, équipée d'un système de levage et d'extension
Client: Une entreprise spécialisée dans la technologie mécatronique (au service de la fabrication d'équipements ferroviaires)
Utilisateur final: Un atelier de la CRRC (China Railway Rolling Stock Corporation)
L'industrie: Construction de véhicules ferroviaires (montage, entretien et réglage des attelages)
Fonctions principales: Déplacement omnidirectionnel (roues Mecanum) + levage (800-1900 mm) + extension (0-1000 mm)
Caractéristiques principales: Télécommande sans fil, batterie LiFePO₄ (autonomie ≥ 8 h), capacité de franchissement de voies ferrées, commande par bus PLC, indice de protection IP54
Numéro d'identification du cas: ZD-CLQ2025122501
Ingénieur commercial: Chang Liquan
Contexte du client et défis du secteur
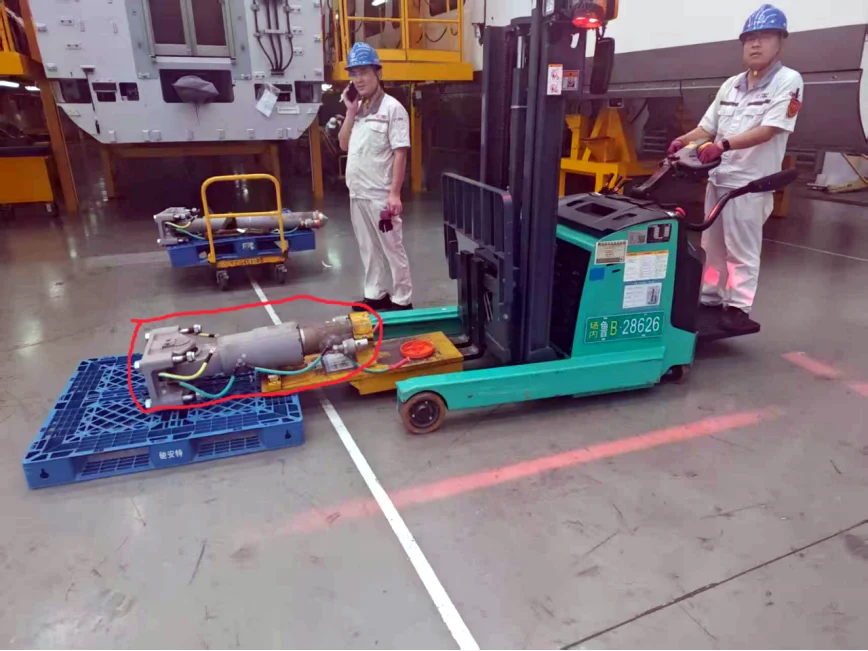
Cet équipement est utilisé dans un Atelier CRRC pour aider alignement précis des raccords avec les trous de fixation. Les attelages sont des éléments de raccordement essentiels pour les véhicules ferroviaires (trains à grande vitesse, métros, locomotives). Leur installation nécessite de soulever un attelage lourd (plusieurs centaines de kilogrammes) jusqu'à une hauteur précise et d'ajuster finement sa position afin de l'aligner avec les trous de fixation de la caisse du véhicule. Traditionnellement, chariots élévateurs sont utilisés pour manipuler les coupleurs, mais ils présentent plusieurs inconvénients :
- Mouvement rigide: Les chariots élévateurs ont un rayon de braquage important, ce qui rend difficile leur manœuvre précise dans les ateliers exigus.
- Pas de réglage fin multidirectionnel: Les chariots élévateurs ne peuvent avancer, reculer et soulever des charges ; ils ne peuvent ni se déplacer latéralement ni étendre leur fourche sur le côté. L'alignement des trous nécessite souvent de repositionner le chariot à plusieurs reprises.
- Difficultés à franchir les rails: Les ateliers sont sillonnés de rails (largeur des rails ≈7 cm). Les pneus standard des chariots élévateurs ne peuvent pas rouler sans à-coups sur ces rails ; ils ont souvent tendance à patiner ou à se coincer.
- Pas de fonction d'extension: La position de montage du coupleur peut se trouver profondément à l'intérieur de la carrosserie du véhicule ; les fourches des chariots élévateurs ont une longueur limitée et ne peuvent pas atteindre cet endroit.
- Commande peu pratique: Le cariste est assis sur la machine et n'a qu'une vue partielle sur le processus d'alignement depuis le côté.
Spécifications de base
| Paramètres | Valeur |
|---|---|
| Dimensions hors tout (L × l × H) | ≤ 1 500 × 1 000 × 800 mm |
| Charge nominale | 500 kg |
| Plage de levage | 800 – 1 900 mm (course nette : 1 100 mm) |
| Plage d'extension | 0 – 1 000 mm (largeur de la plate-forme extensible : 500 mm) |
| Mobilité | Roues Mecanum (traction indépendante aux 4 roues), omnidirectionnelles |
| Capacité de franchissement des passages à niveau | Franchit sans difficulté des traverses d'une largeur maximale de 70 mm |
| Freinage | Freins indépendants sur chaque roue + frein de stationnement |
| Contrôle | Télécommande sans fil (antiparasitage par saut de fréquence) |
| Fonctions de contrôle | Déplacement (avant/arrière/gauche/droite), stabilisateurs (sortir/rentrer), levage (haut/bas), extension (vers l'extérieur/vers l'intérieur) |
| Batterie | LiFePO₄, autonomie ≥ 8 heures |
| Type de moteur | Moteur à courant continu sans balais / servomoteur |
| PLC | Siemens (Profinet) ou équivalent |
| Capteurs | Omron ou équivalent, IP54 |
| Protection électrique | IP54 |
| Les dispositifs de sécurité | Stabilisateurs, arrêt d'urgence, alarme de batterie faible |
| Couleur | Non spécifié (jaune/gris industriel standard) |
| Date de la commande | 29 décembre 2025 |
Solutions
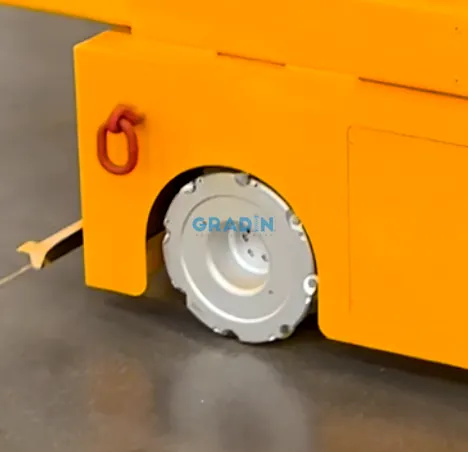
3.1 Châssis omnidirectionnel à roues Mecanum
- Type de roue: Roues Mecanum – permettent des déplacements vers l'avant, vers l'arrière, latéraux et en diagonale, ainsi que des virages à rayon nul.
- Conception des passages à niveau: Utilisation des roues polyuréthane à haute résistance à l'usure avec un coefficient de frottement élevé. La largeur des roues est suffisante pour couvrir des rails de 7 cm. La disposition des roues garantit qu'au moins trois roues restent en contact avec le sol à tout moment, ce qui évite tout coincement dans les interstices entre les rails.
- Freinage: Chaque roue est équipée d'un frein indépendant ; elles peuvent être bloquées à l'arrêt ou sur une pente.
3.2 Levage et extension des plates-formes doubles
- Système de levage: Pont élévateur à ciseaux ou à vérin hydraulique, course de 800 à 1 900 mm (hauteur de levage utile de 1 100 mm), charge nominale de 500 kg.
- Plateforme extensible: Installée au-dessus de la plate-forme élévatrice, elle s'avance de 0 à 1 000 mm dans le sens longitudinal du véhicule. Largeur de la plate-forme déployée : 500 mm. Actionnée par un servomoteur électrique ou un vérin hydraulique, réglable en continu.
- Commande coordonnée: Boutons indépendants sur la télécommande pour les fonctions “ monter/descendre ” et “ sortir/rentrer ” – pouvant être actionnés séparément ou simultanément.
3.3 Télécommande sans fil et protection anti-interférences
- Télécommande: Télécommande sans fil de qualité industrielle, prenant en charge les actions suivantes : déplacement (avant/arrière/gauche/droite), stabilisateurs (sortir/rentrer), levage (haut/bas), extension (sortir/rentrer).
- Anti-interférences: Saut de fréquence ou bande dédiée pour éviter tout conflit avec d'autres appareils sans fil (par exemple, les télécommandes de grues) dans l'atelier.
3.4 Puissance et endurance
- Batterie: Batterie LiFePO₄ conçue pour assurer au moins 8 heures de fonctionnement à pleine charge. Compatible avec un système de remplacement rapide ou de recharge rapide.
- Moteurs: Moteurs à courant continu sans balais ou servomoteurs pour le déplacement, le levage et l'extension – rendement élevé, faible niveau sonore.
3.5 Commande de précision et configuration électrique
- PLC: Siemens ou équivalent, avec bus Profinet – régulation en boucle fermée pour la course, la levée et l'extension.
- Capteurs: Omron ou équivalent, utilisé pour la détection de position, les fins de course et la protection contre les surcharges.
- Indice de protection: Tous les composants électriques (boîtier de commande, moteurs, capteurs) sont conformes à la norme IP54 – étanches à la poussière et aux projections d'eau.
- Mode micro-mouvement: Le mode “ jog ” de la télécommande permet d'effectuer des déplacements par incréments de 1 à 2 mm pour un alignement précis.

3.6 Dimensions hors tout et maniabilité
- Taille: ≤1500 × 1000 × 800 mm (L × l × H) – dimensions compactes adaptées aux allées d'atelier.
- Poids: Poids à vide d'environ 300 à 400 kg, charge utile de 500 kg ; poids total inférieur à 1 tonne pour éviter d'endommager les sols.

3.7 Sécurité et équipements auxiliaires
- Les stabilisateurs: Les quatre pieds stabilisateurs peuvent être déployés à distance avant le levage ou l'extension afin d'améliorer la stabilité et d'éviter tout risque de basculement.
- Arrêt d'urgence: À la fois sur la télécommande et sur le véhicule.
- Indicateur de batterie: L'écran à distance affiche le niveau de la batterie et émet une alarme en cas de batterie faible.

Détails
- Panneau de configuration
 Cylindre hydraulique
Cylindre hydraulique- Roue Mecanum
 Mécanisme de ciseaux
Mécanisme de ciseaux Fourche télescopique
Fourche télescopique- Stabilisateur télescopique
Certificats de produit




FAQ
Si vous souhaitez personnaliser votre équipement de manutention, veuillez cliquer ici. nous contacter →.